For this camera, please select Opus I on the Setup tab.
All settings for the Opus cameras are made by clicking Advanced. Opus cameras use a Foveon sensor, which has a number of setup parameters not found on other cameras.
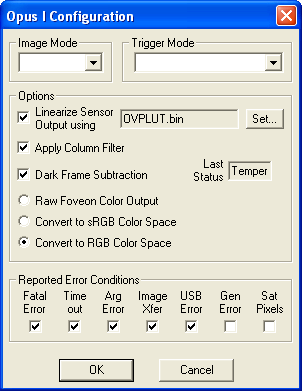
Image Mode is normally set to Color image, but it can be set to read out only the red, green, or blue plane.
Trigger Mode is set Off for normal operation. To use an external trigger, set the mode to Hi-Z input, falling edge or Hi-Z input, rising edge for high impedance input, or 50 ohm input, falling edge or 50 ohm input, rising edge, for a low impedance 50 ohm input. An external shutter or strobe can also be triggered using the Synch output, active high or Synch output, active low setting.
Foveon sensors require linearization, so Linearize Sensor Ouptut using should be on, and a file selected. A default OVPLUT.bin linearization table for Opus cameras is included with the installation; if the manufacturer supplied a different file use that one instead. To select the file, click the Set... button.
Apply Column Filter turns on a special filter that compensates for a slight filtering effect on the data during the readout process. This should normally be turned on.
Dark Frame Subtraction should normally be turned on. These cameras require dark subtraction before the color space conversion, to ensure accurate results.
Last Status gives a status display for the camera. This is used only for technical support purposes.
The color output space can also be set. Raw Foveon Color Output produces an output in the Foveon sensor's intrinsic color space. This is normally used only for testing purposes. Convert to sRGB Color Space is an advanced feature, which produces images that may contain negative numbers. Convert to RGB Color Space is recommended for most users.
Reported Error Conditions is for advanced diagnostic purposes. These should normally all be turned off.
Availability of this feature depends on Product Level.